无人机官网介绍
本文共 292 字,大约阅读时间需要 1 分钟。
参考官网:http://dev.px4.io/master/en/index.html
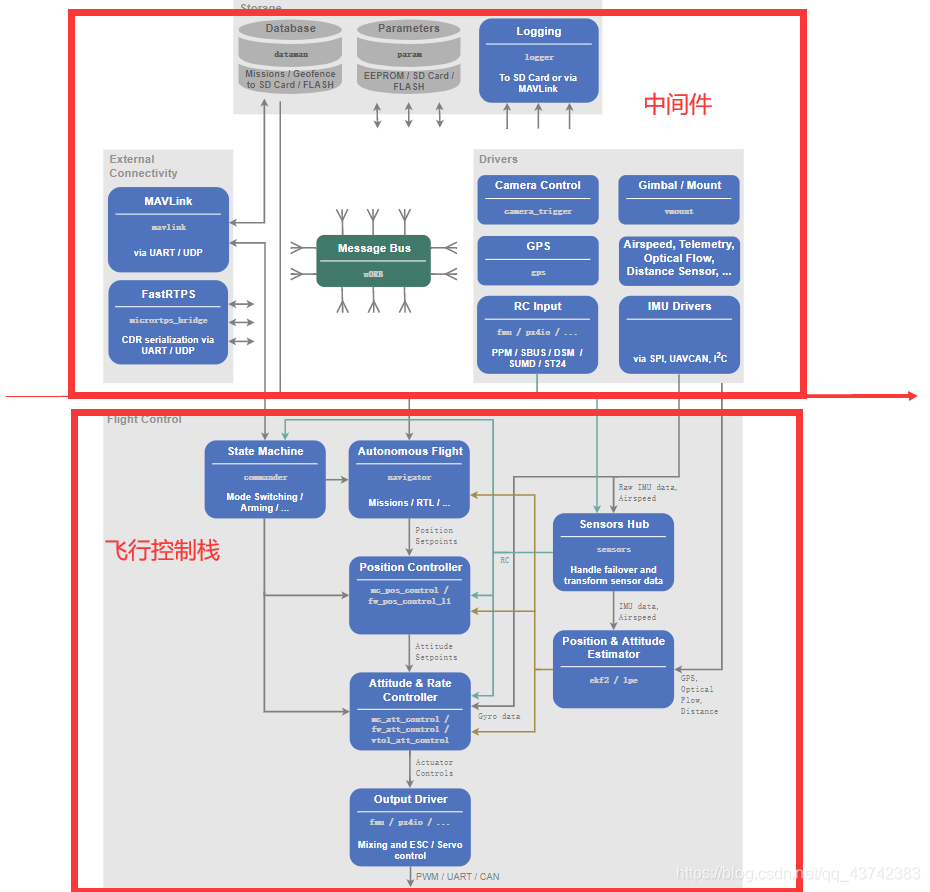
程序在运行期间可以通过在shell端输入执行top指令查看哪些模块正在被执行,当运行模块时可以通过输入<moudles name> start/stop来实现模块的使用与停止。 PX4软件架构:
 更新速率:大多数IMU的更新速率是1KHZ,以250HZ的速率发布消息; 可以通过uorb top实时查看更新速率:
更新速率:大多数IMU的更新速率是1KHZ,以250HZ的速率发布消息; 可以通过uorb top实时查看更新速率:http://dev.px4.io/master/zh/middleware/uorb.html(注:这里介绍如何添加信息自定义的uORB消息,自定义详见这里) cpp
后续更新介绍…转载地址:http://mjwzi.baihongyu.com/
你可能感兴趣的文章
【设计模式】六大设计原则篇
查看>>
【设计模式】理论整合+应用场景(一)
查看>>
【设计模式】理论整合+应用场景(二)
查看>>
《操作系统概论》调度算法小总
查看>>
二叉树遍历
查看>>
原码、反码、补码、移码举例
查看>>
Web Form框架(UI+BLL+DAL)学习
查看>>
【设计模式】比较篇
查看>>
【SQL Server】备份数据库失败:备份集中的数据库备份与现有的数据库不同
查看>>
【SQL Server】还原数据库失败:因为某些数据库功能在当前版本中不可用
查看>>
【SQL Server】还原数据库失败:设备上的媒体簇的结构不正确。错误:3241
查看>>
【SQL Server】还原数据库失败:错误5171:无法为该请求检索数据
查看>>
存储过程的正确建立
查看>>
【SVN】初使用
查看>>
【SVN】初认识
查看>>
【SVN】初实践
查看>>
【C#】返回值为DataTable的数据
查看>>
【C#】DataGriView控件的简单使用
查看>>
【C#】Factory层浅析
查看>>
【XML】基础
查看>>